
Hướng dẫn Kỹ thuật Toàn diện về Bộ truyền động Robot Hình người
Robot hình người đối mặt với thách thức kỹ thuật khổng lồ khi phải chịu đựng hàng nghìn cú va đập mỗi giờ, đòi hỏi bộ truyền động phải cân bằng giữa sức mạnh, trọng lượng và khả năng chịu nhiệt. Bài viết này đi sâu vào các giải pháp kỹ thuật như bộ truyền động dạng sóng, vít con lăn hành tinh và quản lý nhiệt độ để tạo ra robot thực sự hữu dụng.
Hướng dẫn Kỹ thuật Toàn diện về Bộ truyền động Robot Hình người
Một robot hình người thực hiện khoảng 5.000 bước đi mỗi giờ. Mỗi bước chân tạo ra một cú sốc lực tương đương 2–3 lần trọng lượng cơ thể truyền qua các bộ truyền động ở chân. Những lực này có thể chấp nhận được nếu xảy ra thỉnh thoảng, nhưng sẽ trở nên phá hủy khi lặp lại hàng nghìn lần liên tục. Chu kỳ làm việc không ngừng nghỉ này là lý do khiến hầu hết các bộ truyền động (actuator) thất bại ở robot hình người, và cũng là lý do những mẫu robot tồn tại được đều hội tụ về cùng một giải pháp kỹ thuật.
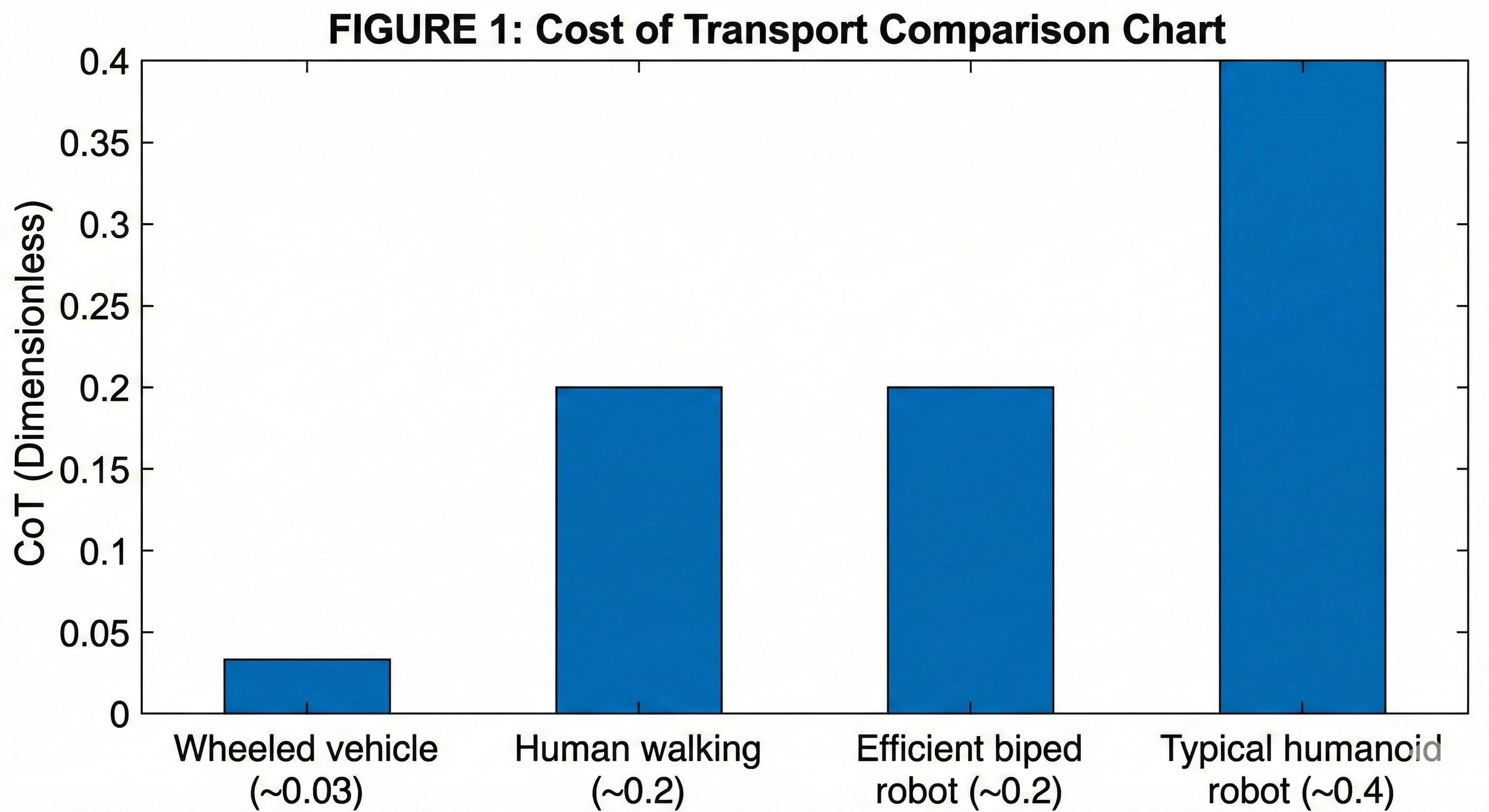
Biểu đồ so sánh hiệu quả chi phí vận chuyển
Vấn đề của việc Đi bộ: Tại sao Robot Hình người lại Hỏng Bộ truyền động?
Các kỹ sư đo lường hiệu quả di chuyển bằng chỉ số Cost of Transport (CoT) — tỷ lệ năng lượng tiêu thụ so với trọng lượng di chuyển trên một khoảng cách. Xe bánh xe đạt giá trị CoT từ 0,01–0,05, trong khi robot hai chân thường rơi vào khoảng 0,2 đến 0,5. Điều này có nghĩa là robot hai chân tiêu tốn năng lượng kém hiệu quả hơn 10 đến 50 lần.
Đối với thiết kế bộ truyền động, mỗi gam khối lượng đều làm tăng CoT. Robot phải nâng và gia tốc khối lượng đó ở mỗi bước chân. Bộ truyền động nặng hơn không chỉ thêm trọng lượng mà còn làm tăng chi phí năng lượng cho chuyển động.
Một yếu tố quan trọng khác là sự khác biệt giữa lực tĩnh và lực động. Các bộ truyền động công nghiệp thường được đánh giá cho tải trọng tĩnh, nhưng đi bộ lại hoàn toàn khác. Trong giai đoạn gót chân chạm đất, một robot 70kg chịu lực 1.400–2.100N được áp dụng trong khoảng 50–100 mili-giây. Một vít bi rated cho 5.000N tải trọng tĩnh thường sẽ bị hỏng khi chịu các tác động động lặp đi lặp lại 2.000N vì các bi bên trong có thể gây lõm rãnh (brinelling) dưới tải trọng sốc.
Vòng xoáy Khối lượng (Mass Penalty Spiral)
Khối lượng là ràng buộc khắc nghiệt nhất trong thiết kế bộ truyền động robot hình người. Khi một bộ truyền động quá nặng, robot không chỉ mang thêm trọng lượng mà còn rơi vào một chu trình nhân lên.
Hãy xem xét một nhà thiết kế chọn bộ truyền động rẻ hơn nhưng nặng hơn 200g cho khớp mắt cá chân:
- Bước 1 (Mắt cá chân): +200g được thêm vào bàn chân.
- Bước 2 (Đầu gối): Bộ truyền động đầu gối giờ phải nâng 200g đó ở cuối đòn bẩy (cẳng chân). Để xử lý mô-men xoắn tăng thêm, bộ truyền động đầu gối phải lớn hơn +350g.
- Bước 3 (Hông): Bộ truyền động hông giờ phải nâng bàn chân nặng hơn (+200g) VÀ đầu gối nặng hơn (+350g). Nó phải được tăng kích thước thêm +600g.
- Bước 4 (Pin): Để cung cấp năng lượng cho các động cơ lớn hơn, pin phải lớn thêm +150g.
Kết quả: Một lỗi 200g ở cấp độ linh kiện trở thành mức phạt 1,3kg ở cấp độ hệ thống. Robot giờ chậm hơn, kém hiệu quả hơn và dễ bị hư hại do tác động hơn.
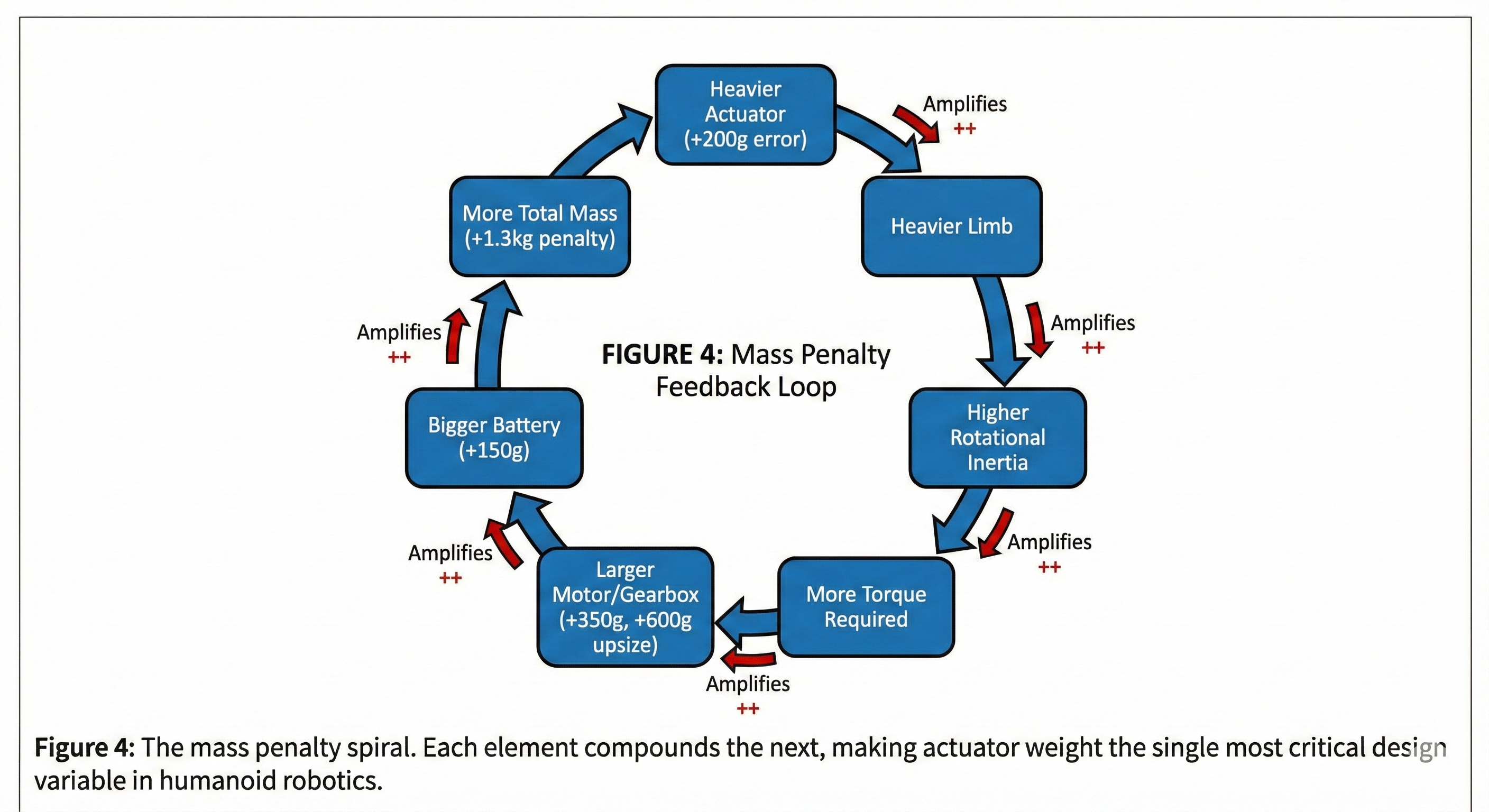 Sơ đồ vòng lặp phạt khối lượng
Sơ đồ vòng lặp phạt khối lượng
Giải pháp Hội tụ: Kiến trúc Chia tách
Các công ty như Tesla, Figure và Apptronik đều độc lập đi đến cùng một kiến trúc bộ truyền động: sử dụng bộ truyền động quay (rotary) cho các khớp chủ yếu xoay và bộ truyền động tuyến tính (linear) cho các khớp phải chịu tải trọng nặng và hấp thụ sốc.
Bộ truyền động Quay: Strain Wave Gearing
Đối với các khớp chủ yếu xoay như vai, cổ tay và xoay hông, các bộ truyền động quay hiện đại được xây dựng xung quanh Strain Wave Gearing (thường gọi là Harmonic Drive) kết hợp với động cơ khung không khối lượng cao.
Khác với bánh răng tiêu chuẩn dựa vào răng cứng lưới vào nhau, Strain Wave Gear dựa vào biến dạng đàn hồi của kim loại để truyền chuyển động. Nó là tiêu chuẩn công nghiệp cho robot chính xác vì cực kỳ nhỏ gọn, nhẹ và tạo ra độ backlash (khe hở) bằng không.
Tại sao robot hình người sử dụng chúng?
- Zero Backlash: Kim loại linh hoạt được nén chặt vào vòng ngoài, tạo ra độ chơi bằng không, giúp chuyển động mượt mà.
- Mô-men xoắn cao: Tạo ra lực xoắn lớn tương đối với kích thước và trọng lượng nhỏ.
- Giảm tốc một tầng: Đạt được tỷ số truyền cao trong một tầng duy nhất, giữ cho bộ truyền động phẳng và nhỏ gọn.
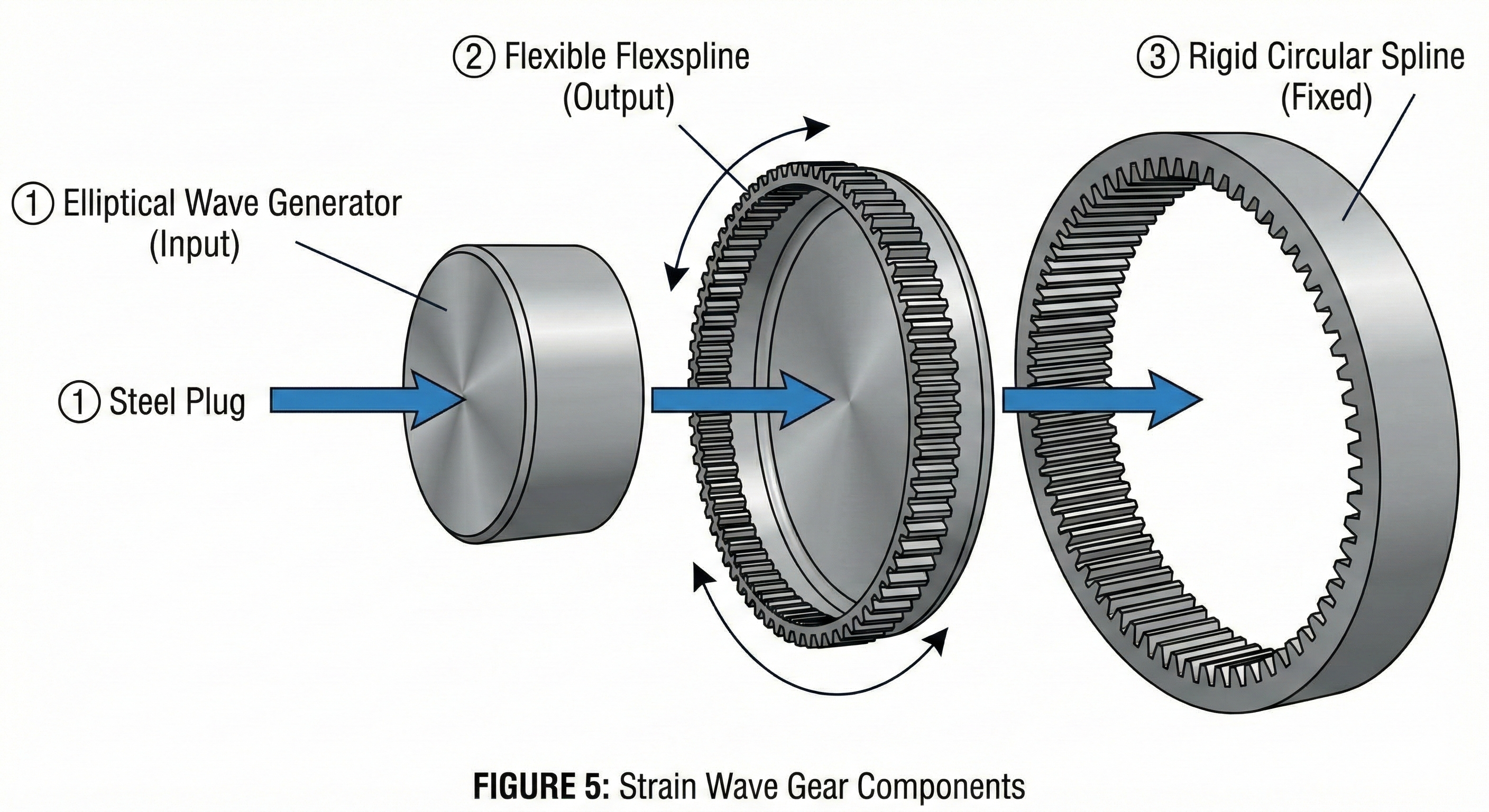 Sơ đồ các thành phần của Strain Wave Gear
Sơ đồ các thành phần của Strain Wave Gear
Bộ truyền động Tuyến tính: Planetary Roller Screws
Đối với các khớp phải hấp thụ sốc nặng như đầu gối, khuỷu tay và mắt cá chân, các robot sử dụng bộ truyền động tuyến tính xây dựng xung quanh Planetary Roller Screws (Vít con lăn hành tinh).
Tại sao dùng Roller Screws thay vì Ball Screws (Vít bi)? Vít bi sử dụng quả cầu lăn trong rãnh, tiếp xúc điểm. Roller screws sử dụng con lăn ren tiếp xúc đường. Điều này phân phối tải trọng trên diện tích bề mặt lớn hơn — thường lớn hơn 10–15 lần so với vít bi cùng kích thước.
Khi chân robot chạm đất, tác động sốc đi qua khớp. Trong vít bi, tiếp xúc điểm tạo ra ứng suất Hertzian cực cao, gây lõm rãnh (Brinelling). Roller screws tồn tại vì tiếp xúc đường giữ ứng suất dưới ngưỡng chịu đựng, ngay cả dưới tải trọng sốc lặp đi lặp lại.
Đánh đổi Tỷ số truyền và Quán tính
Bi kịch cơ bản của robot học là động cơ điện và chi tay sinh vật muốn những thứ đối lập. Động cơ hiệu quả thích quay nhanh 3.000+ RPM với mô-men thấp, trong khi đầu gối người hoạt động khoảng 30 RPM với mô-men lớn.
Để cầu nối khoảng cách này, kỹ sư dùng giảm tốc. Nhưng giảm tốc không phải là miễn phí. Nó đưa ra "Quán tính phản chiếu" (Reflected Inertia).
Nếu bạn đặt hộp số 100:1, bạn nhân mô-men đầu ra lên 100, nhưng quán tính (độ kháng thay đổi tốc độ) được nhân lên bình phương của tỷ số truyền. Điều này có nghĩa là khi chân robot chạm đất, chân "cảm thấy" rô-to động cơ nặng hơn 10.000 lần so với thực tế. Điều này tạo ra trở lực cơ học cao, truyền tải sốc trực tiếp vào răng hộp số.
Có hai cách tiếp cận:
- Quasi-Direct Drive (QDD): Tỷ số truyền thấp (6:1 đến 10:1). Robot "nảy" tự nhiên, hấp thụ xung kích tốt, nhưng cần động cơ lớn và tiêu tốn nhiều năng lượng để giữ tư thế tĩnh.
- High-Reduction: Tỷ số truyền cao (50:1 đến 160:1). Sức mạnh lớn trong gói nhẹ, nhưng cần cảm biến mô-men xoắn phức tạp để mô phỏng sự mềm dẻo.
Thực tế Nhiệt trong Chân Robot
Trong khi truyền động và quán tính định hình cách robot di chuyển, nhiệt động lực học định hình thời gian nó có thể làm việc. Khoảng cách lớn giữa "Mô-men xoắn đỉnh" (Peak Torque) và "Mô-men xoắn liên tục" (Continuous Torque) là yếu tố phân biệt demo phòng thí nghiệm và sản phẩm thương mại.
Khi robot đứng yên, động cơ phải chống lại trọng lực liên tục. Theo định luật Joule Heating (Pheat = I² × R), nhiệt lượng tăng theo bình phương dòng điện. Trong tư thế ngồi xổm, các bộ truyền động đầu gối hoạt động giống như lò nướng.
Hầu hết các bộ truyền động làm mát bằng không khí chỉ có thể duy trì 25–30% mô-men đỉnh. Để giải quyết vấn đề này, các nhà sản xuất đang chuyển sang làm mát bằng chất lỏng, bơm dầu điện môi qua các kênh trong vỏ động cơ, giúp nâng khả năng mô-men liên tục lên tới 60–70% mô-men đỉnh.
Kiến trúc Điều khiển: Từ PWM đến Điều khiển Mô-men
Để tồn tại trong thế giới thực, robot phải "tuân thủ" (compliant) — phải nhường bước cho các lực bất ngờ. Điều này đòi hỏi Điều khiển Mô-men (Torque Control) thay vì Điều khiển Vị trí (Position Control) cứng nhắc.
Các bộ truyền động hiện đại sử dụng Field Oriented Control (FOC), cho phép điều khiển trực tiếp dòng điện tạo ra mô-men. Kết hợp với Impedance Control (điều khiển trở kháng), robot có thể tạo ra "lò xo ảo" trong phần mềm, điều chỉnh độ cứng (stiffness) và độ giảm chấn (damping) theo thời gian thực.
Ví dụ, robot có thể làm chân cứng như đá khi đặt chân xuống đất, sau đó ngay lập tức mềm mại để hấp thụ một vấp ngã. Model Predictive Control (MPC) thậm chí đi xa hơn, chạy mô phỏng vật lý để dự đoán trạng thái tương lai của robot và điều chỉnh trước khi ngã xảy ra.
Tóm lại, việc thiết kế bộ truyền động cho robot hình người không chỉ là chọn một động cơ mạnh, mà là giải quyết một bài toán tối ưu hóa phức tạp bao gồm cơ học, nhiệt động lực học và lý thuyết điều khiển.
Bài viết liên quan

Công nghệ
Hacker bí ẩn 'Misere' tấn công nền tảng nhắn tin Tchap của chính phủ Pháp, lộ dữ liệu 73.000 tài khoản
15 tháng 6, 2026

Công nghệ
Tấn công mạng làm tê liệt nhà máy đường lớn tại Australia, nông dân không thể thu hoạch
17 tháng 6, 2026

Công nghệ
OpenAI tặng ưu đãi Codex đặc biệt cho 8.000 developer sau khi tiệc GPT-5.5 cháy vé
05 tháng 5, 2026